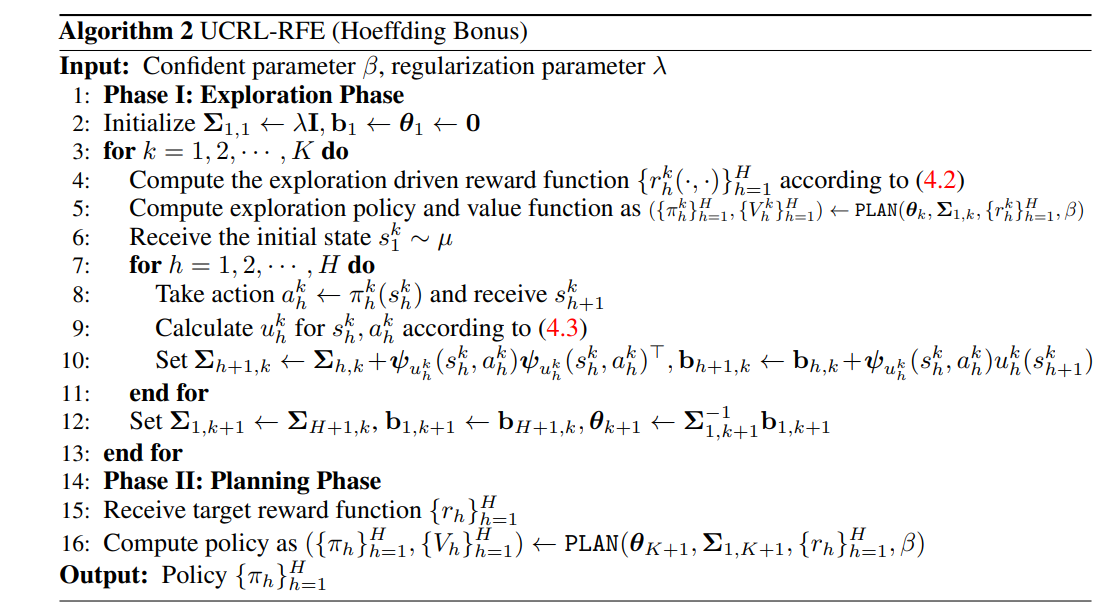
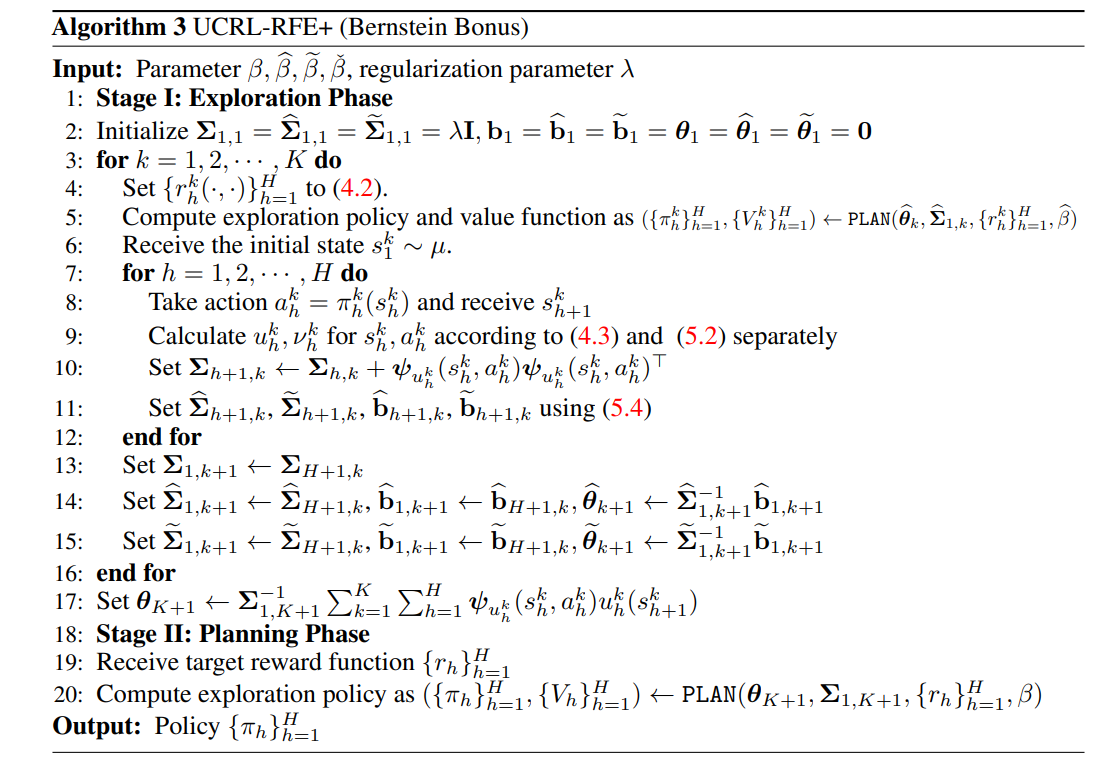
我们研究了情景马尔可夫决策过程(MDP)的基于模型的线性函数近似无报酬强化学习。在此设置中,智能体分两个阶段工作。在探索阶段,智能体人与环境相互作用,在没有报酬的情况下收集样本。在规划阶段,智能体人被赋予特定的奖励功能,并使用从勘探阶段收集的样本来学习好的政策。在线性混合MDP假设下,我们提出了一种新的可证明有效算法,称为UCRL-RFE,其中MDP的转移概率核可以通过定义在状态、动作和下一状态三元组上的特定特征映射上的线性函数来参数化。我们证明,为了获得任意奖励函数的ϵ最优策略,UCRL-RFE需要最多采样~O(H5d2 \1013− 2)勘探阶段的事件。这里,H是插曲的长度,d是特征映射的维度。我们还提出了使用伯恩斯坦型奖金的UCRL-RFE的变体,并表明它最多需要采样~O(H4d(H+d)ϵ− 2)以实现ϵ最优策略。通过构造一类特殊的线性混合MDP,我们还证明了对于任何无报酬算法,它至少需要采样~Ω(H2dϵ− 2)集以获得ϵ最优策略。根据对ϵ的依赖性和对d的依赖性,如果H,我们的上界与下界匹配≥ d
在强化学习(RL)中,主体顺序地与环境交互并从中获得奖励。在许多现实世界的RL问题中,奖励功能是手动设计的,以鼓励代理人的期望行为。因此,工程师必须一次一次地改变奖励功能,并训练代理检查它是否达到了预期的行为。在这种情况下,RL算法需要用不同的奖励函数重复执行,因此样本效率低下甚至难以处理。为了应对这一挑战,Jin等人[9]提出了一种新的强化学习范式,称为无奖励探索(RFE),该范式在不使用任何奖励函数的情况下探索环境。详细地说,无报酬RL算法由两个阶段组成。第一个阶段称为探索阶段,算法在不接收奖励信号的情况下探索环境。第二阶段称为规划阶段,在该阶段,算法被赋予特定的奖励功能,并使用第一阶段收集的数据来学习策略。他们已经表明,这种探索范式可以在规划阶段学习一个接近最优的策略,在探索阶段收集多项式集数后,给出任何奖励函数。后续工作[12,14,28]提出了改进的算法,以实现更好或接近最佳的样本复杂度。上述所有工作都集中在表格马尔可夫决策过程(MDP)上,其中状态和动作的数量是有限的。在实践中,状态和动作的数量可能很大,甚至是无限的,因此为了计算的可处理性和泛化,需要函数近似。然而,即使是在最简单的线性函数近似下,对于无报酬探索的函数近似的理解仍然没有得到充分的探索,只有两项值得注意的相关工作[18,27]。具体而言,Wang等人[18]研究了线性MDP[21,10],其中转移概率和奖励函数都允许线性表示,并提出了一种无奖励RL算法,其中Oe(d 3H6ϵ−2)样本复杂度,其中d是线性表示的维数,H是规划范围,ϵ是所需的精度。他们还证明,如果最优状态动作函数是线性的,那么无报酬探索需要在规划范围H中的指数数量的事件来学习ϵ最优策略。Zanette等人[27]考虑了一类稍大的具有低固有Bellman误差的MDP[26],并提出了一种具有Oe(d 3H5ϵ−2)样本复杂性。然而,这两项工作都假设奖励函数是一些特征映射上的线性函数。此外,[18]中证明的下界适用于一类非常大的MDP,其中最优状态作用函数是线性的,因此它过于保守,无法告诉线性MDP或相关模型的无报酬探索的信息理论极限。