极限汽车运动控制
汽车作为拥有数千部件的复杂系统,长久以来,通过不同模块之间的互相制衡与协同,在固化的功能中找到折衷方案,保证变化路况下人们的驾驶安全。
未来的智能化车辆控制,不但要求在极端状况下保持车身的稳定性,如高速爆胎和动态附着路面下的驾乘安全,同时也追求在动态路况下更精细的驱动、制动控制效果。
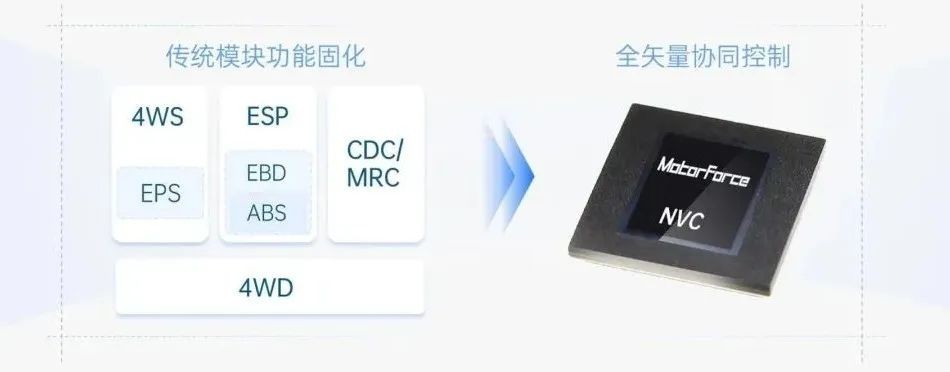
全矢量协同控制系统是复杂条件下获得优秀车辆动态性能的关键技术。这是一种新的运动控制架构,能够主动推测未来车身的最佳状态,打通固化的模块功能,统一目标协同作战,寻找系统的最优协作控制方式。
全矢量协同控制技术
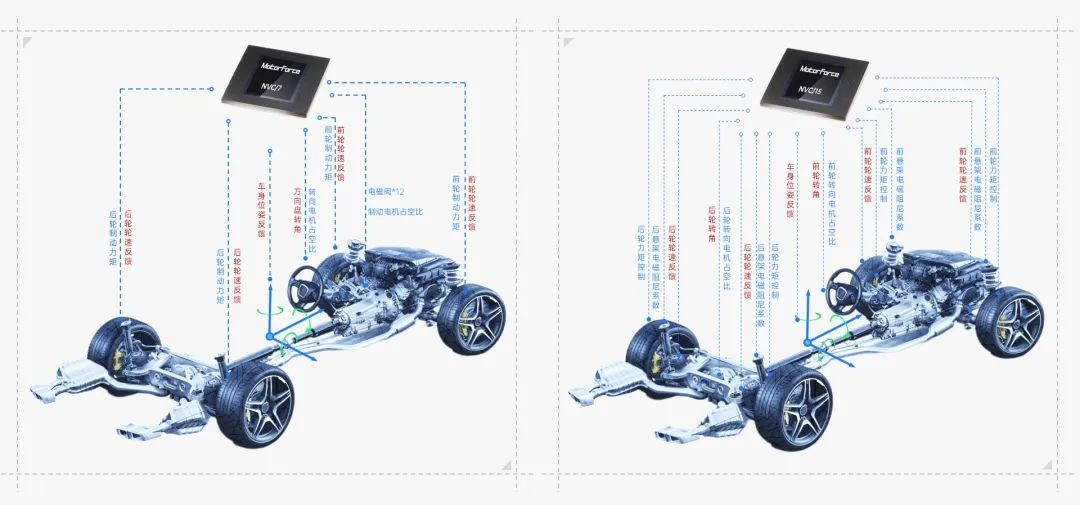
基于南栖领先的AI控制技术,「强化动力 MotorForce」团队研发“驱动-制动-转向-悬架矢量协同控制技术(VCC)”。作为面向未来的全矢量协同控制技术,将实时轨迹目标与转向电机、驱动电机、制动电机、制动电磁阀等执行系统的实时微动作进行一体优化决策。VCC充分考虑执行系统之间的协同配合,提高系统控制的自由度,有助于全工况下的车辆控制精度与系统可靠性提升。
除了安全和性能外,运动控制还面临着舒适、节能、个性化等多性能目标如何有效协调从而实现系统最优化的新问题。VCC技术可快速、有效的识别多性能目标冲突,实现多性能目标的车辆矢量协同控制优化,来更安全舒适的驾乘体验。
VCC技术的出现,是汽车从传统的机械方程式控制向灵活的生物运动控制的正式迈进,也使未来一体化的自动驾驶成为可能。
神经矢量控制器NVC Neural Vector Controller
实现 VCC 的核心,是神经矢量控制芯片(NVC)。MotorForce基于数据驱动的AI技术,训练目标驱动、整体优化的高维度联合控制模型,并通过策略神经网络安全性测试和量化技术,提供可信、高效的控制芯片,保证NVC能够在车机端以高频率、低功耗运行,满足智能底盘控制的安全性目标。


大幅提升开发效率、降低交付周期
NVC系列芯片结合创新的数据驱动AI技术,能够充分挖掘企业原有的数据资源,释放AI巨大力量,解决以往无法解决的业务挑战。提供数据驱动的汽车协同控制系统解决方案,旨在高效、高性能、低成本地完成开发业务,满足汽车安全性、高效性、舒适性要求,帮助汽车行业客户提升核心竞争力。

NVC/7 开发验证
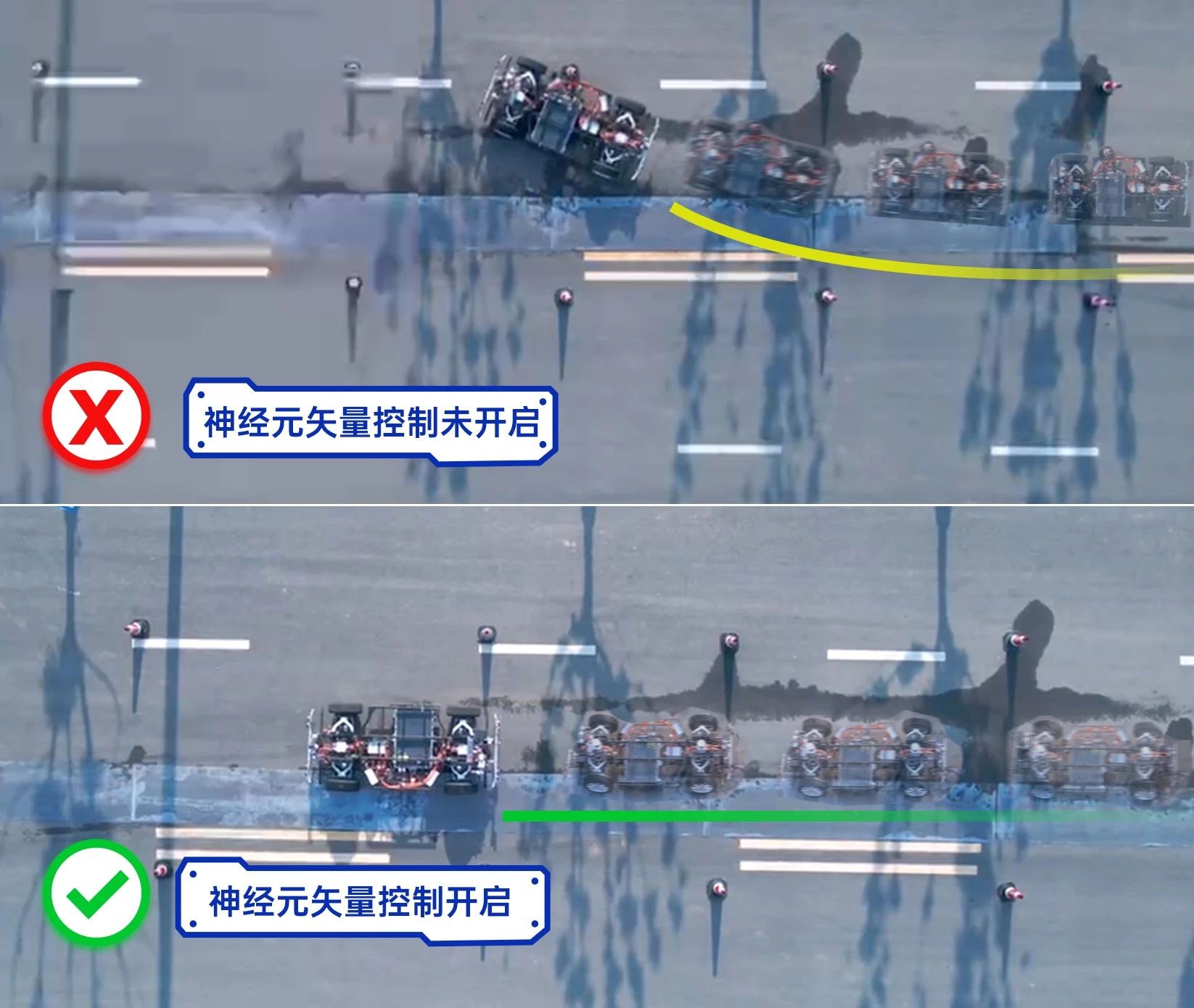
与当前传统的底盘控制技术相比,使用了NVC/7矢量协同控制技术的试验车辆,在转弯及变道时可以主动抑制过度转向,智能控制回正扭矩,入弯平顺出弯迅速。
在紧急制动工况下,可以智能协同转向电机输出扭矩与四轮的制动力矩,在低附对开等危险工况下NVC/7能够大幅减少车辆驾驶控制难度、提升综合行驶安全性能。
NVC/7 方案将于2023年11月交付系统集成伙伴。
最新科技进展和更多相关信息,请持续关注南栖仙策公众号(POLIXIR)。