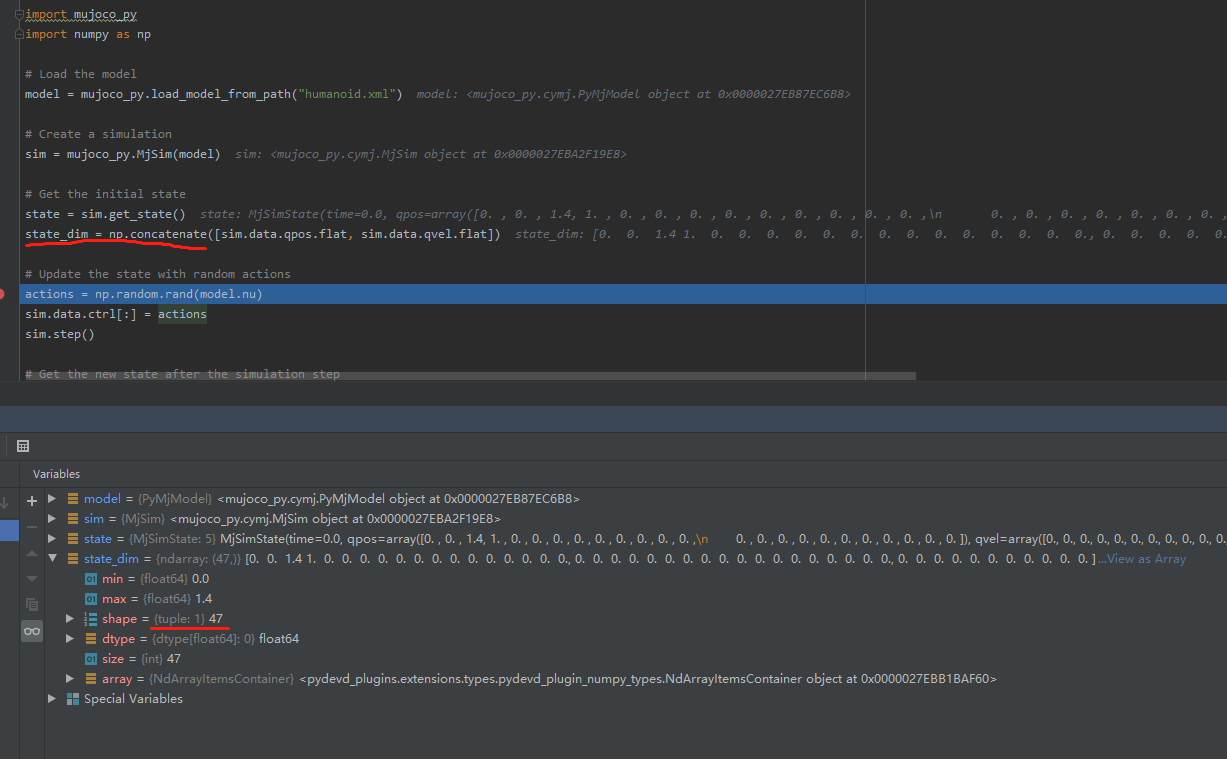
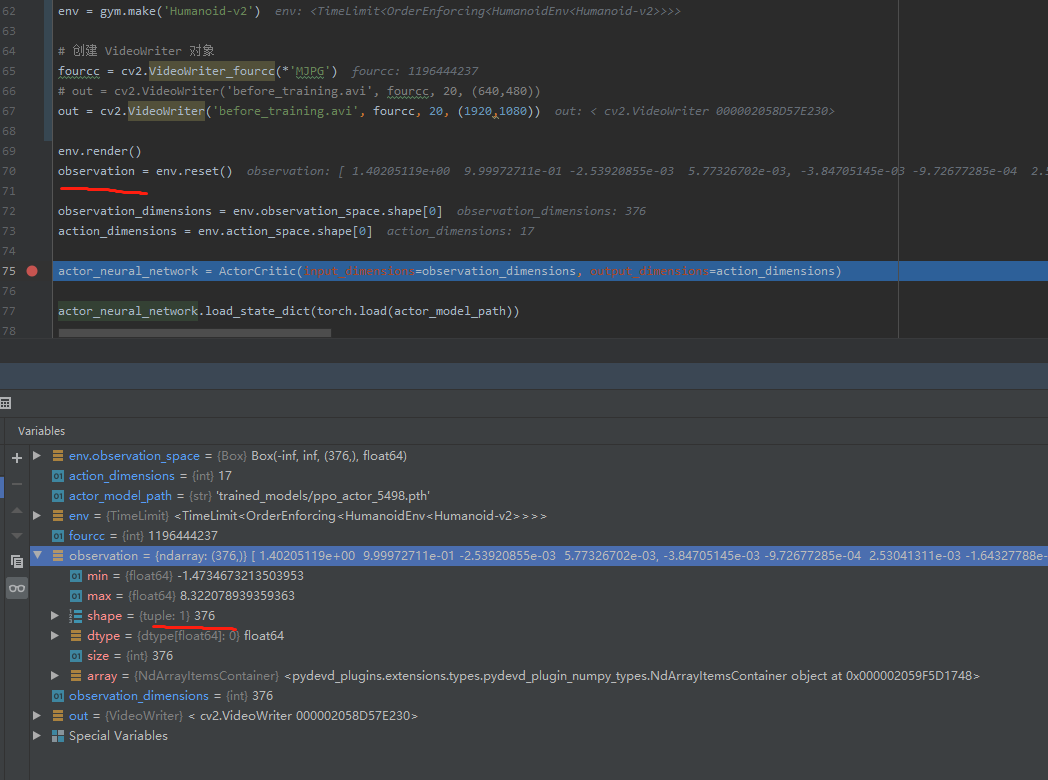
为什么 gym.make('Humanoid-v2') env.observation_space.shape[0]值为376 而 mujoco_py.load_model_from_path("humanoid.xml") state_dim = state.qpos.shape[0] + state.qvel.shape[0]值为47,两者的输入状态维度不一样