作者探索了多智能体领域的深度强化学习方法,首先分析传统算法在多智能体情况下的难度:Q-learning 受到环境固有的非平稳性的挑战,而策略梯度受到随着智能体数量增加而增加的方差的影响。 然后提出了一种对 actor-critic 方法的改进,该方法考虑了其他智能体的动作策略,并且能够成功地学习需要复杂的多代理协调的策略。 此外作者引入了一种训练方案,该方案利用针对每个智能体的一组策略,从而产生更强大的多智能体策略, 与合作和竞争场景中的现有方法相比,该智能体群体能够发现各种物理和信息协调策略。
论文地址: https://arxiv.org/pdf/1706.02275.pdf
Github地址: https://github.com/philtabor/Multi-Agent-Deep-Deterministic-Policy-Gradients
环境地址:https://github.com/openai/multiagent-particle-envs
B站视频:
视频时间线:
time stamps:
0:00 Intro
02:28 Abstract
03:18 Paper Intro
08:13 Related Works
09:02 Markov Decision Processes
10:35 Q Learning Explained
15:25 Policy Gradients Explained
19:14 Why Multi Agent Actor Critic is Hard
20:15 DDPG Explained
24:21 MADDPG Explained
29:11 Experiments
37:57 How to Implement MADDPG
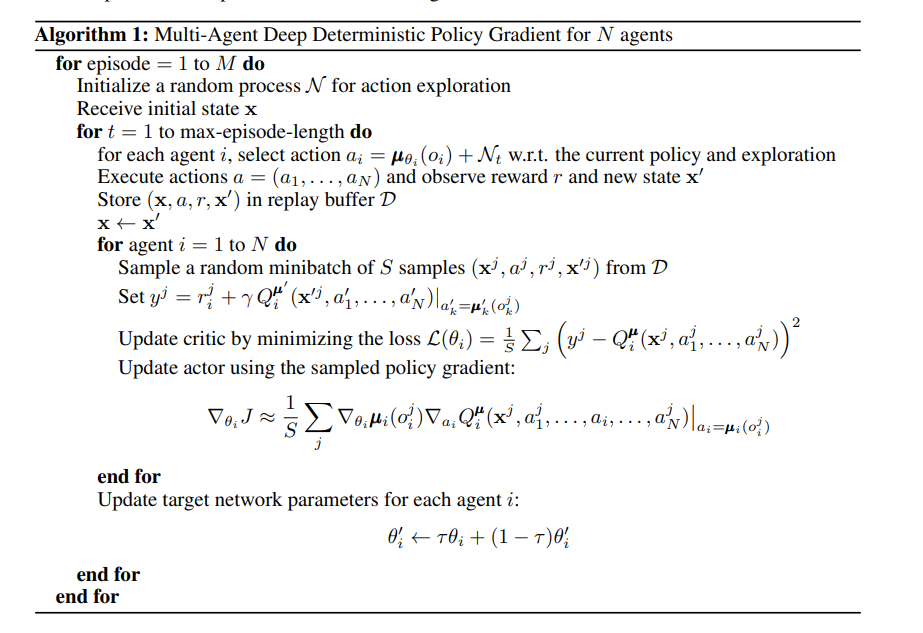
40:54 MADDPG Algorithm
42:23 Hyperparameters for MADDPG
43:42 Multi Agent Particle Environment
45:09 Environment Install & Testing
55:37 Coding the Replay Buffer
01:07:34 Actor & Critic Networks
01:15:36 Coding the Agent
01:26:05 Coding the MADDPG Class
01:39:23 Coding the Utility Function
01:40:13 Coding the Main Loop
01:46:58 Moment of Truth
01:52:09 Testing on Physical Deception
01:55:48 Conclusion & Results