本文转载自知乎:https://zhuanlan.zhihu.com/p/489475047
强化学习快速发展的主要原因在于有一个良好的模拟环境,最终得到一个最优的policy, 然而现实问题就是在实际落地应用中没有有效的环境,为了解决实验环境问题,本文主要对现有的离线强化学习数据集D4RL进行安装,并就出现的相关问题进行汇总。
一、关于D4RL Benchmarks数据集
[Github], [Paper]
1.1 为什么选择 D4RL?
(1) D4RL 收集了大型数据集,包括交互式环境中智能体的记录(即自动驾驶Carla、AntMaze、Mujoco等),且有简单和复杂分类,种类非常丰富,例如:
通过人工演示或硬编码控制器生成的数据。
具有不同策略的异构混合的数据
数据观察智能体在同一环境中完成各种目标。
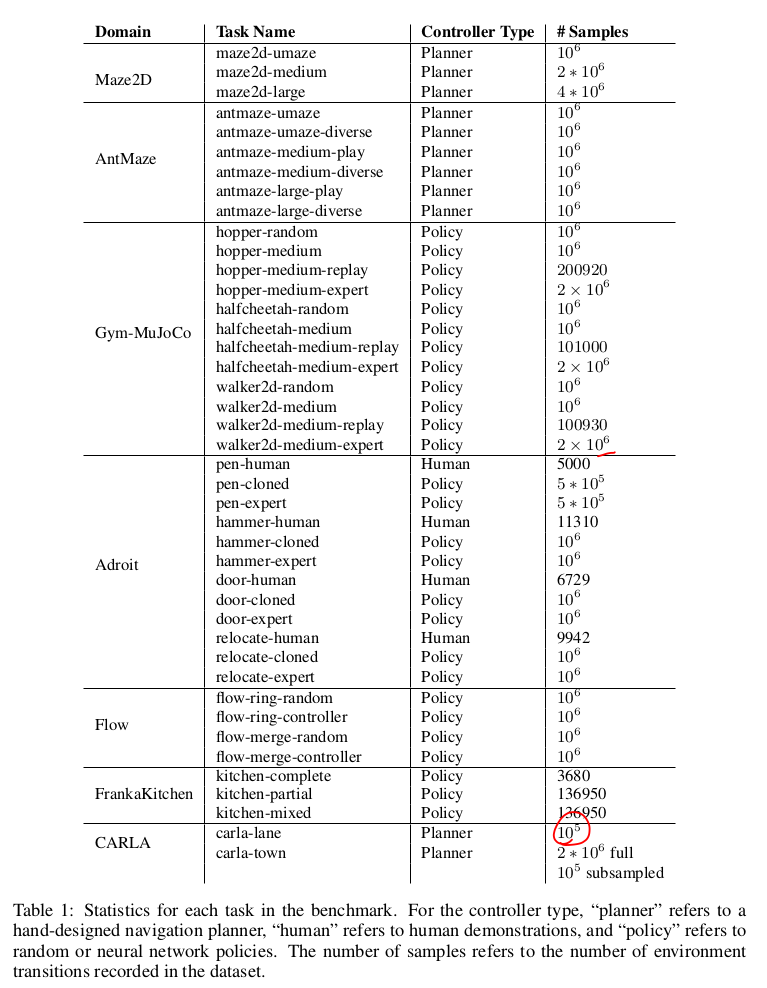 Environment
Environment
(2) D4RL提供了非常简单的API接口,方便于学习者直接去获取数据集完成智能体的训练。
import d4rl # Import required to register environments env = gym.make('maze2d-umaze-v1') dataset = env.get_dataset()
(3) D4RL定义了标准的衡量指标
(4) D4RL提供了丰富的baseline基准,包括了常见的Offline算法,包括BCQ、BEAR、BRAC等等
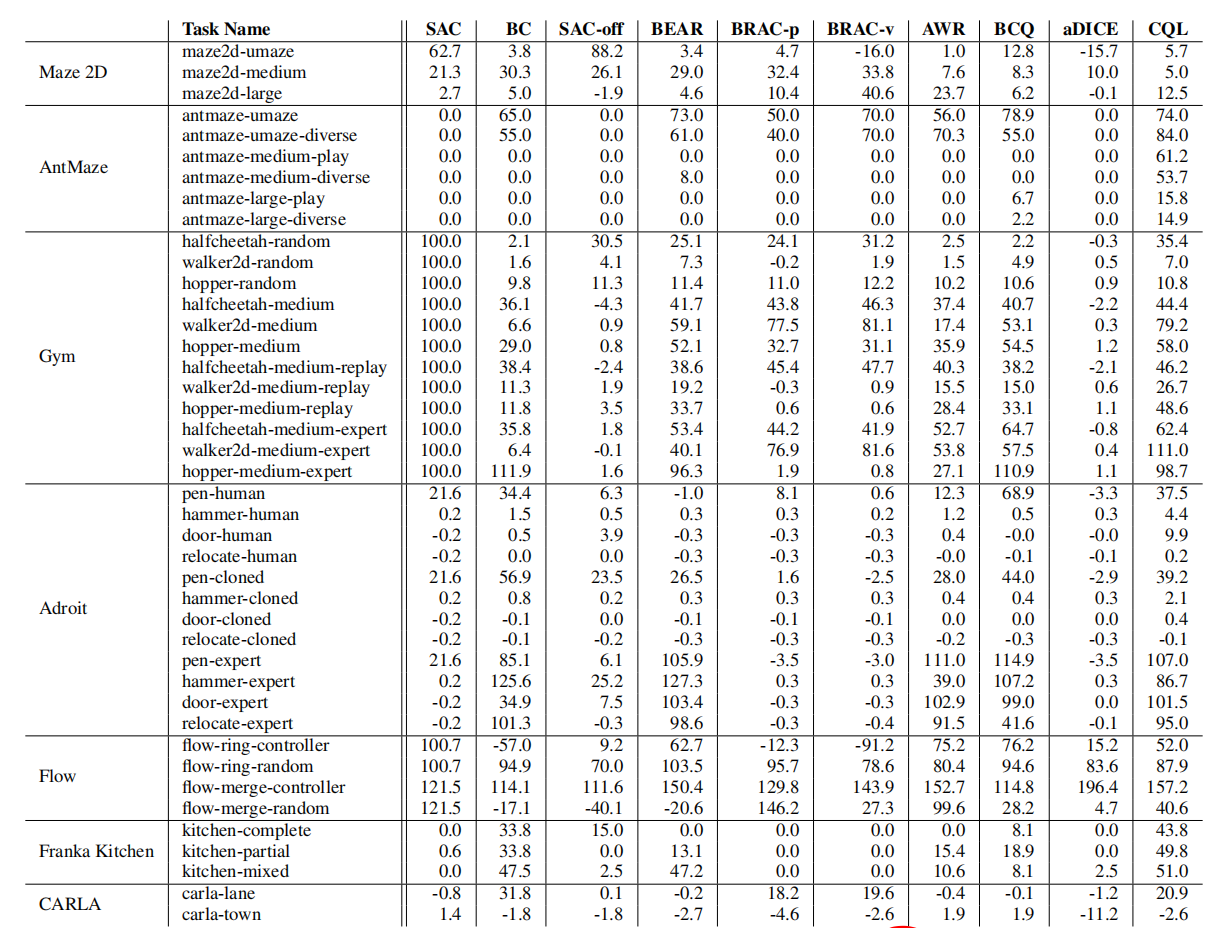 Baseline score
Baseline score
1.2 D4RL数据集制作影响因素
D4RL数据集目前来说是离线强化学习涵盖数据集非常丰富的一个数据集,数据质量非常高。其中最主要的是数据的采集综合了6类因素
Narrow and biased data distributions
Undirected and multitask data
Sparse rewards
Suboptimal data.
Non-representable behavior policies, non-Markovian behavior policies, and partial observ- ability.
Realistic domains
二、D4RL安装与使用
2.1 官方安装指导(有坑)
D4RL 的安装相对来说比较容易,但其中也有很多的坑
git clone https://github.com/rail-berkeley/d4rl.git cd d4rl pip install -e .
另外一种简单的安装方法
pip install git+https://github.com/rail-berkeley/d4rl@master#egg=d4rl
其中会有很多坑,导致安装失败。
下面我们根据初始化安装文件setup.py分析安装
from distutils.core import setup from platform import platform from setuptools import find_packages setup( name='d4rl', version='1.1', install_requires=['gym', 'numpy', 'mujoco_py', 'pybullet', 'h5py', 'termcolor', # adept_envs dependency 'click', # adept_envs dependency 'dm_control' if 'macOS' in platform() else 'dm_control @ git+git://github.com/deepmind/dm_control@master#egg=dm_control', 'mjrl @ git+git://github.com/aravindr93/mjrl@master#egg=mjrl'], packages=find_packages(), package_data={'d4rl': ['locomotion/assets/*', 'hand_manipulation_suite/assets/*', 'hand_manipulation_suite/Adroit/*', 'hand_manipulation_suite/Adroit/gallery/*', 'hand_manipulation_suite/Adroit/resources/*', 'hand_manipulation_suite/Adroit/resources/meshes/*', 'hand_manipulation_suite/Adroit/resources/textures/*', ]}, include_package_data=True, )
2.2 有效安装过程(避坑)
上述过程安装后我们会发现遇到很多问题,下面我就自己的安装过程以及遇到的问题一一列举
安装环境: Ubuntu18.04, anaconda3
第一步:安装mujoco210(针对没有安装mujoco)
# 下载地址 https://github.com/deepmind/mujoco/releases/tag/2.1.0 cd ~/Downloads/ wget https://github.com/deepmind/mujoco/releases/download/2.1.0/mujoco210-linux-x86_64.tar.gz mv mujoco210-linux-x86_64.tar.gz mujoco210 tar -zxvf mujoco210-linux-x86_64.tar.gz mkdir ~/mujoco cp -r mujoco210 ~/mujoco # 添加环境变量 sudo gedit ~/.bashrc export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$HOME/.mujoco/mujoco210/bin export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH} source ~/.bashrc # 测试 cd ~/.mujoco/mujoco210/bin/ ./simulate ../model/humanoid.xml
 image-20220317113717084
image-20220317113717084
坑1:can't find /.mujoco/lib/libmujoco.so.2.1.1(可能安装mujoco200的伙伴会遇到)
解决办法:
(1)下载mujoco211安装包,解压
(2)在mujoco210/lib下找到libmujoco.so.2.1.1,并复制在~/.mujoco/bin在~/.bashrc下
(3)添加环境变量并source
export MJLIB_PATH=~/.mujoco/lib/libmujoco.so.2.1.1 source ~/.bashrc
第二步:安装mujoco_py
# 本步跳过conda环境创建,直接进入虚拟环境(conda create -n d4rl python=3.7) conda create -n d4rl python=3.7 conda activate d4rl pip install mujoco_py python Python 3.7.11 (default, Jul 27 2021, 14:32:16) [GCC 7.5.0] :: Anaconda, Inc. on linux Type "help", "copyright", "credits" or "license" for more information. >>> import mujoco_py >>> # 备:没有报错表示安装成功
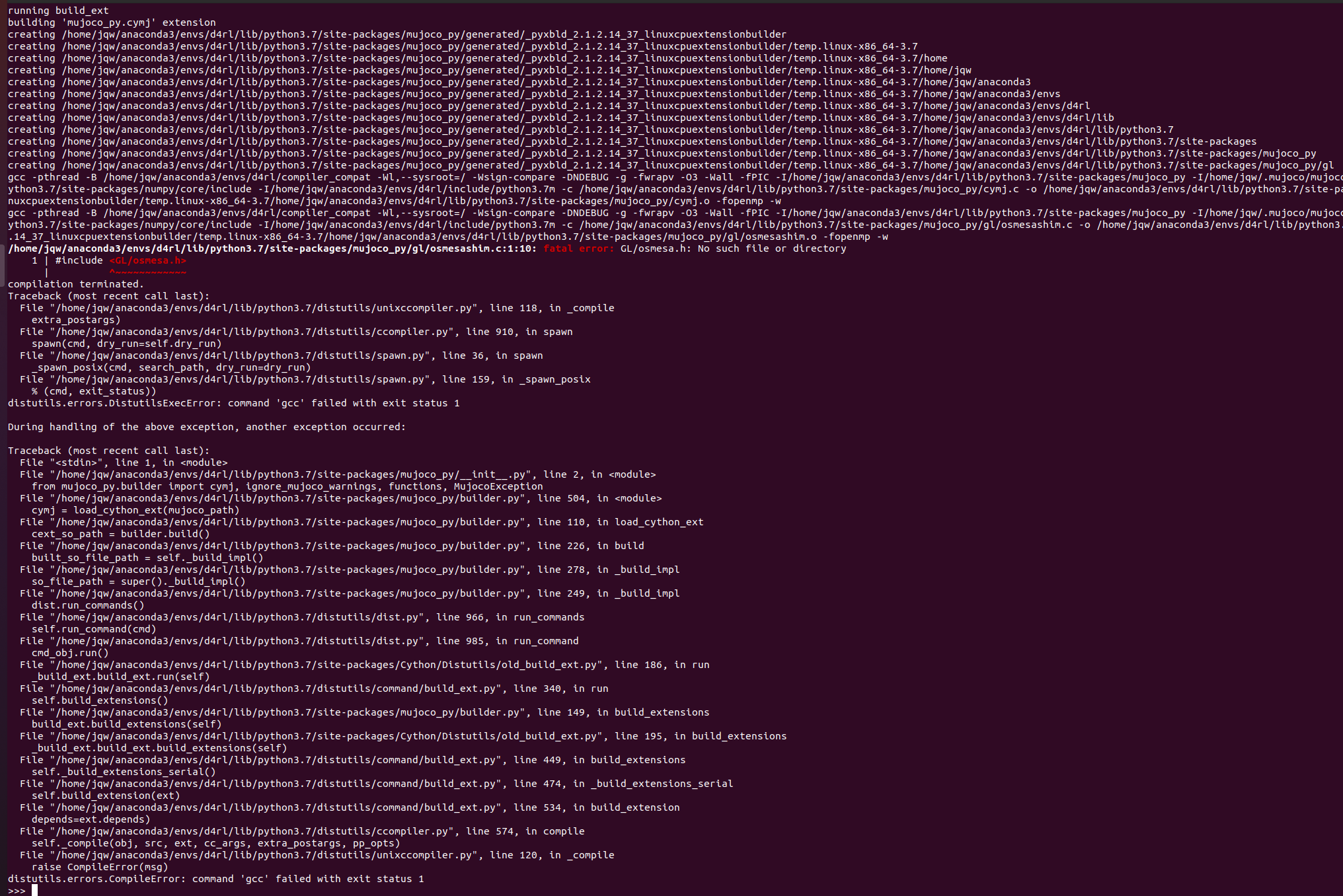 image-20220328171507687
image-20220328171507687
坑2: 如果是fatal error: GL/osmesa.h: No such file or directory,那就安装libosmesa6-dev
Python 3.7.11 (default, Jul 27 2021, 14:32:16) [GCC 7.5.0] :: Anaconda, Inc. on linux Type "help", "copyright", "credits" or "license" for more information. >>> import mujoco_py running build_ext building 'mujoco_py.cymj' extension gcc -pthread -B /home/jqw/anaconda3/envs/d4rl/compiler_compat -Wl,--sysroot=/ -Wsign-compare -DNDEBUG -g -fwrapv -O3 -Wall -fPIC -I/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py -I/home/jqw/.mujoco/mujoco210/include -I/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/numpy/core/include -I/home/jqw/anaconda3/envs/d4rl/include/python3.7m -c /home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/cymj.c -o /home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/generated/_pyxbld_2.1.2.14_37_linuxcpuextensionbuilder/temp.linux-x86_64-3.7/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/cymj.o -fopenmp -w gcc -pthread -B /home/jqw/anaconda3/envs/d4rl/compiler_compat -Wl,--sysroot=/ -Wsign-compare -DNDEBUG -g -fwrapv -O3 -Wall -fPIC -I/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py -I/home/jqw/.mujoco/mujoco210/include -I/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/numpy/core/include -I/home/jqw/anaconda3/envs/d4rl/include/python3.7m -c /home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/gl/osmesashim.c -o /home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/generated/_pyxbld_2.1.2.14_37_linuxcpuextensionbuilder/temp.linux-x86_64-3.7/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/gl/osmesashim.o -fopenmp -w /home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/gl/osmesashim.c:1:10: fatal error: GL/osmesa.h: No such file or directory 1 | #include <GL/osmesa.h> | ^~~~~~~~~~~~~ compilation terminated. Traceback (most recent call last): File "<stdin>", line 1, in <module> File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/__init__.py", line 2, in <module> from mujoco_py.builder import cymj, ignore_mujoco_warnings, functions, MujocoException File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 504, in <module> cymj = load_cython_ext(mujoco_path) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 110, in load_cython_ext cext_so_path = builder.build() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 226, in build built_so_file_path = self._build_impl() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 278, in _build_impl so_file_path = super()._build_impl() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 249, in _build_impl dist.run_commands() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/dist.py", line 966, in run_commands self.run_command(cmd) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/dist.py", line 985, in run_command cmd_obj.run() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/Cython/Distutils/old_build_ext.py", line 186, in run _build_ext.build_ext.run(self) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/command/build_ext.py", line 340, in run self.build_extensions() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/mujoco_py/builder.py", line 149, in build_extensions build_ext.build_extensions(self) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/site-packages/Cython/Distutils/old_build_ext.py", line 195, in build_extensions _build_ext.build_ext.build_extensions(self) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/command/build_ext.py", line 449, in build_extensions self._build_extensions_serial() File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/command/build_ext.py", line 474, in _build_extensions_serial self.build_extension(ext) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/command/build_ext.py", line 534, in build_extension depends=ext.depends) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/ccompiler.py", line 574, in compile self._compile(obj, src, ext, cc_args, extra_postargs, pp_opts) File "/home/jqw/anaconda3/envs/d4rl/lib/python3.7/distutils/unixccompiler.py", line 120, in _compile raise CompileError(msg) distutils.errors.CompileError: command 'gcc' failed with exit status 1
解决办法:
sudo apt install libosmesa6-dev # 补充命令: sudo apt-get install libgl1-mesa-glx libosmesa6
坑3: 如果是fatal error: GL/glew.h: No such file or directory,那么就安装Glew库
解决办法
sudo apt-get install libglew-dev glew-utils
坑4: 如果是FileNotFoundError: [Errno 2] No such file or directory: 'patchelf': 'patchelf', 那就安装patchelf
解决办法:
sudo apt-get -y install patchelf
安装成功是这样的效果
 image-20220328174928475
image-20220328174928475
第三步:安装dm_control
pip install dm_control
第四步: 安装d4rl
克隆D4RL仓库
git clone https://github.com/rail-berkeley/d4rl.git
找到到d4rl目录下的setup.py文件,注释mujoco_py, dm_control
install_requires=['gym', 'numpy', # 'mujoco_py', 'pybullet', 'h5py', 'termcolor', # adept_envs dependency 'click', # adept_envs dependency # 'dm_control' if 'macOS' in platform() else # 'dm_control @ git+git://github.com/deepmind/dm_control@master#egg=dm_control', 'mjrl @ git+git://github.com/aravindr93/mjrl@master#egg=mjrl'],
然后直接安装并测试
# installing pip install -e . # 测试,创建test_d4rlpy.py并添加如下内容 vim test_d4rl.py import gym import d4rl # Import required to register environments # Create the environment env = gym.make('maze2d-umaze-v1') # d4rl abides by the OpenAI gym interface env.reset() env.step(env.action_space.sample()) # Each task is associated with a dataset # dataset contains observations, actions, rewards, terminals, and infos dataset = env.get_dataset() print(dataset['observations']) # An N x dim_observation Numpy array of observations # Alternatively, use d4rl.qlearning_dataset which # also adds next_observations. dataset = d4rl.qlearning_dataset(env) python test_d4rlpy.py
ERROR: Could not find a version that satisfies the requirement mjrl (unavailable) (from d4rl) (from versions: none) ERROR: No matching distribution found for mjrl (unavailable)
安装命令
pip install git+https://github.com/rail-berkeley/d4rl@master#egg=d4rl
最后的D4RL安装结果结果
 image-20220317180305194
image-20220317180305194
最后贴出我的~/.bashrc文件,欢迎参考
# cuda、anaconda等环境变量可以设置在本部分以前
# 环境变量次序也很重要 # mujoco(这里我安装了两部分) export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$HOME/.mujoco/mujoco210/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$HOME/.mujoco/mujoco211/bin export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH} export MJLIB_PATH=~/.mujoco/lib/libmujoco.so.2.1.1 # nvidia export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia export LD_PRELOAD=~/anaconda3/envs/d3rlpy/lib/python3.7/site-packages/d3rlpy/dataset.cpython-37m-x86_64-linux-gnu.so # export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so:/usr/lib/nvidia-465/libGL.so export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
更多的坑大家可以参阅issue: https://github.com/rail-berkeley/d4rl/issues
坑6: 有的伙伴可能会用pycharm去运行mujoco会出现一个问题就是:有nvidia的环境变量没有mujoco的,有mujoco的没有nvidia的
Exception: Missing path to your environment variable. Current values LD_LIBRARY_PATH= Please add following line to .bashrc: export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/jqw/.mujoco/mujoco210/bin # 或者这样的 Exception: Missing path to your environment variable. Current values LD_LIBRARY_PATH=LD_LIBRARY_PATH:/usr/lib/nvidia Please add following line to .bashrc: export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/jqw/.mujoco/mujoco210/bin
解决办法:
直接在pycharm运行配置中修改环境变量: python文件上右键后进入 Modify Run Configuration
 image-20220328180705232
image-20220328180705232
重点就是两个变量之间用 冒号隔开":",不是分号";", 然后就ok了PYTHONUNBUFFERED=1;LD_LIBRARY_PATH=LD_LIBRARY_PATH:/usr/lib/nvidia:$LD_LIBRARY_PATH:/home/jqw/.mujoco/mujoco210/bin
参考文献
[1]. https://sites.google.com/view/d4rl/home
[2]. https://github.com/rail-berkeley/d4rl
[3]. Justin Fu, Aviral Kumar, Ofir Nachum, George Tucker, Sergey Levine, "Datasets for Deep Data-Driven Reinforcement Learning",2019
————————————————
版权声明:本文为知乎博主「旺财搬砖记」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://zhuanlan.zhihu.com/p/489475047